


RGB传感器制导AGV的行走策略研究
摘要:用RGB传感器制导的AGV具有控制简单、制造成本低等特点,可利用其行走策略的规划来弥补它的行走精度等问题,并且尽量减少传感器的数量体现它的特点。
关键词:路径规划;行走策略;RGB传感器;AGV
一、概述
自主导航轮式机器人(AGV)是上世纪50年代发展起来的智能搬运(装配)型机器人。AGV是现代工业自动化物流系统中的关键设备之一,它是以电池为动力,装备电磁或光学等自动导航装置,能够独立自动寻址,并通过计算机系统控制,完成无人驾驶及作业的设备。AGV一般采用轮式驱动,具有电动车的特征。AGV小车能在地面控制系统的统一调度下,自动搬运货物,实现自动化的物料传送。因其具有灵活性、智能化等特点,能够方便地重组系统,达到生产过程中的柔性化运输之目的。较之传统的人工或半人工的物料输送方式,AGV系统大大减轻了劳动强度和危险性,提高了工作效率,在机械、电子、纺织、卷烟、医疗、食品、造纸等行业都可以发挥作用。
AGV导航系统的功能是保证AGV小车沿正确路径行走,并保证一定行走精度。AGV的制导方式之一是有导引路线(固定路线)的方式,而固定路线的导引方式之一是光学控制带制导方式,它利用地面颜色与导航带颜色的反差来识别,如在深颜色的地面上导航带为白色。AGV上装有颜色(RGB)传感器,均匀分布跟随在导航带及两侧位置上,检测不同的组合信号,以控制AGV的方向,使其跟踪路轨。可以采用模糊控制算法对小车进行控制。光学控制带制导方式采用RGB传感器作为AGV的信号输入端,具有计算控制简单、元器件成本低等特点及足够的响应速度和控制精度。
在自动化车间、立体仓库等仓储物流系统中,AGV一般以室内平地简单路径行走为主,针对这种情况,本文研究了以RGB传感器导航AGV的行走控制策略问题。
二、传感器的布局
首先,本研究的AGV是一采用两轮独立驱动差速转向的三轮实验小车,两轮差速转向是将两驱动轮同轴线独立地固定于车体的两侧,通过调速控制使两驱动轮产生不同的速度来实现转向。在小车车体纵轴线前方装有一个万向轮,形成一个三轮小车的AGV,见图1所示。
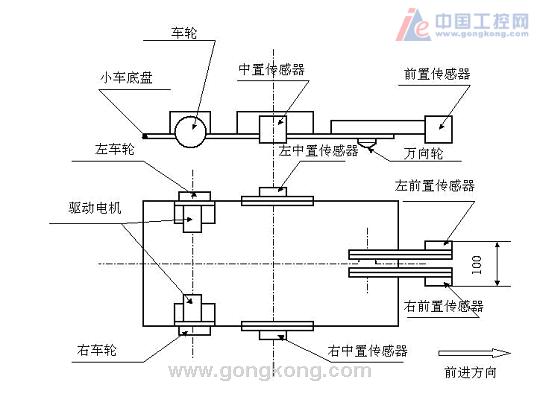
为了使AGV控制简单、制造成本低。最初,所有RGB传感器都被布置在小车底盘区域内,把传感器分为两组,沿底盘纵轴线两側对称布置,而且可沿底盘纵、横轴线方向进行调整、固定,经过反复试验,效果均不理想。后来,将两组传感器移至底盘区域外布置才满足行走要求,如图1所示。这种传感器布局分为前、中两组,每组两个传感器。前置传感器位于底盘前端,且为纵轴对称布置,它离横轴较远是为了使小车行走有足够的调整距离,在前置传感器探测到离开白线的时候,偏离角度较小,可以很快纠正过来。中置传感器位于底盘中部的横轴上,相对于纵轴对称。
本研究的实验场地模拟物流仓库的室内运输条件, 具有直线路径、弯道、岔路口、进入工作站等典型平面路径。其白色导航带宽度为100毫米。
三、典型路径行走策略划分
AGV的行走策略按照典型路径情况,分为直线路径行走策略、岔路口、弯道行走策略和进入工作站行走策略。
1. 直线路径行走策略
1)小车是否沿着直线路径(白线)行走,由前置传感器探测。正常情况如图2a)所示。前置传感器都在100mm的白线上,则小车沿着直线路径(白线)行走。
2)在行走中,如果有一个前置传感器偏出探测不到白线。如图2b)所示,如前置左侧传感器探测不到白线,而右侧传感器探测到白线,则认为小车偏左,纠正方法是使小车右侧电机减速,左侧电机加速,使得两个前置传感器回到白线位置。若小车偏右,可采用类似方法处理。
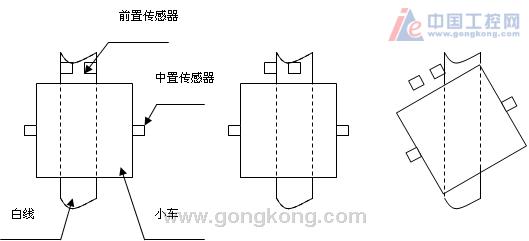
a) b) c)
图2 小车直线路径行走示意图
3)如果两个前置传感器都在白线外,如图2c)所示,这种情况一般是传感器的出现误判。因为若一个前置传感器偏离白线,用2)的方法就能把小车纠正过来,根据实验结果,当一个前置传感器偏离白线的角度在5°以内,都能自动纠正过来。通常小车的两个电机同向转动,由于速度的同步性误差回造成小车行走方向有少量偏差,传感器已经会略微偏出白线。如果传感器出现误判,会造成两个前置传感器都在白线外,此时,小车继续前行,可由中置传感器检测到白线后,根据时间的长短来判定(与弯道的情况区分开来),令小车向探测到白线的那一个中置传感器方向转弯,直到两个前置传感器回到白线上,此时,耽误的时间会略长些。
2. 岔路口、弯道行走策略
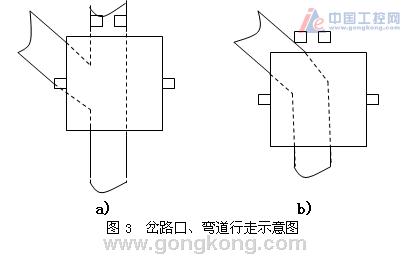
1)根据中置传感器以及路口次序确定。前置传感器跟随着白色导航线行走,在小车前方出现岔路口时,在短时间内中置传感器检测到分岔的白线,如图3a)所示,根据控制计算机内存中路口的信息,能够辨别出前方不同的路口。在辨别出路口之后,停车转弯,直到前置传感器找到白线,继续前进。
2)遇到弯道时,先是前置传感器丢失白线,如图3b)所示,继续前进一段后,此时,小车停止前进向探测到白线的那一个中置传感器方向转弯,随后前置传感器也一定检测到白线,当两个前置传感器同时检测到白线之后,判断方向正确,停止转动,沿此方向继续前进。
3. 进入工作站策略

在每个工作站所在的地面上,有一个边长为300mm的正方形检测区域,如图4所示。区域中心有线宽为50mm的白色十字线,对角线的两个顶点各安装有一个检测距离为200mm左右的红外传感器。当两个红外传感器均检测到上方有物体时,物流管理系统计算机即认为该AGV已经准确到达该工作站,便可进行物流工作调度。
由于AGV小车采用的传感器布局较分散,较难精确定位十字线。但是,可以通过规划行走策略,使AGV小车停止在十字线上。其行走顺序如下:
1)小车沿直线行走,直到前置两个传感器探测不到白线,小车停止前进。
2)小车以较慢的固定速度前进,直到前置传感器中有一个检测到十字白线为止。这一步骤可初步定位十字线。 3)小车再减速,以更慢的固定速度前进,同时启动定时器,定时器超时,则立刻停车。小车启动定时器向前慢行,不受传感器的影响,称为延时盲走,是为了保证了覆盖检测区的红外传感器。
4)小车到达工作站后,即可进行相应的物流工作,具体停留时间可另行设定。
5)当小车完成工作站的任务后,以较慢的固定速度倒车,同时启动定时器,定时器超时,则立刻停车。倒车距离与第三步盲走的距离等长,以免不能寻回白线。
6)小车顺时针原地旋转180º,当右中置传感器先探测到白线,小车继续旋转使右中置传感器越过白线,小车再继续旋转直到两前置传感器全都探测到白线为止。
7)寻到白线之后,小车继续以直线方式行走。
四、 行走控制策略
自动导航车通过传感器探测当前的路径状况、小车当时的工作状态以及存储器中已存储的电子地图来决定下一步动作。控制器可采用单片机,虽然实现较复杂的算法时编程繁琐,因此本研究采用电子地图的方法,以简化计算过程。
将整个行走路径分解为若干段典型路径,如前所述直线、岔路口、弯道和工作站路径等。确定每一段路径应当采取的动作,给每一段路径一个编号,将所有编号按路径顺序编制为一个列表,将该列表存于内存中,故内存中存有整个路径信息,实现地图的电子化。同样,将针对每一段路径小车应采取的动作进行编号并与路径编号一一对应,形成动作列表,小车行走遇到什么路径信息,控制器就从动作列表调出相应控制指令,控制小车的正确行走。
五、 结束语
通过用RGB传感器制导AGV的行走策略实验、研究表明,AGV小车能按预先设定的路径行走,而且所用的RGB传感器数量少,单片机控制简单,成本低。但行走精度略低,可通过进一步研究改进设计提高。本研究对于进一步开发物流系统的AGV产品及相关的教学研究具有一定的意义。
[参考文献]
[1] 张铁,李琳,曾德怀.自主导航巡逻机器人的行走系统研究.广州:机床与液压,2003.5,37~41
[2]朱宏辉.自由路径AGV的运动模拟实验研究.武汉:武汉理工大学学报(交通科学与工程版),2002.2
[3] Gademann, A.J.R.M.; van de Velde, S.L. Positioning automated guided vehicles in a loop layout.European Journal of Operational Research Volume: 127, Issue: 3, December 16, 2000, pp. 565~573
[4] Tahboub K A, Asada H H .Dynamics analysis and control of a holonomic vehicle with a continuously variable transmission[J].AS M E Journal of Dynamic Systems,Measure ment,and Control. 2002,124(3):118~126
[5] 王元庆.新型传感器原理及应用.北京:机械工业出版社,2002.5
 投诉建议
投诉建议
提交

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会